


Prinzip (07/2005), Kosten, Hauptseite
Ich werde auf dieser Seite den Roboter nach und nach vorstellen, wenn ich was baue den Zustand darstellen, aber auch über Probleme mit der Hard- und Software berichten.
Gleich ein paar Worte vorweg, ich betreibe die Sache hier als Hobby, das heißt ich habe keinen Druck und wenn es mal eine Weile nicht vorwärts geht, dann ist es auch gut.
12/2021 - Software und Hardware, D435 und Google Coral
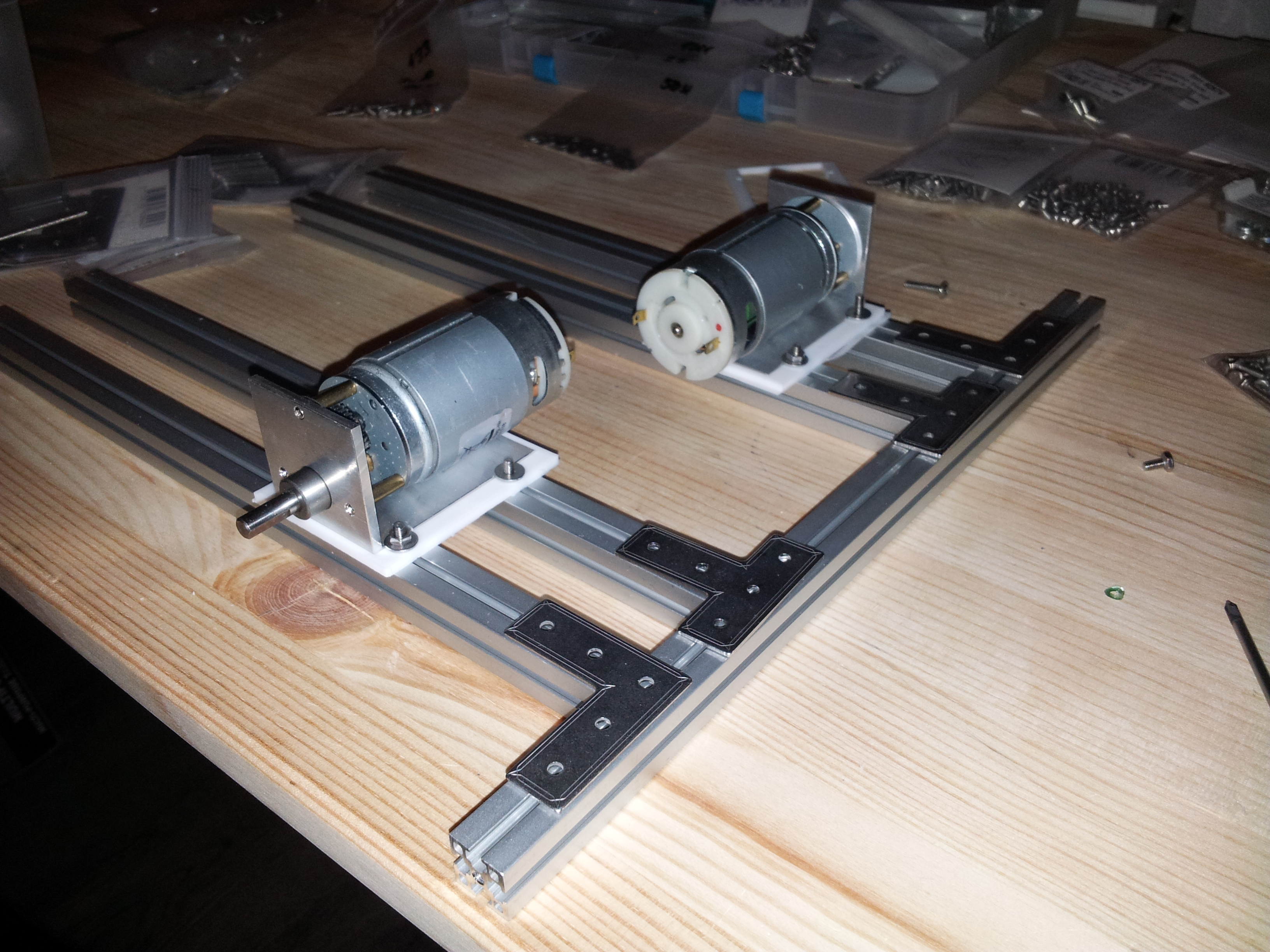
01/2021 - Motoren mit Halterung montiert, zusätzlich Teile gedruckt, testweise montiert
11/2020 - ich werde das Projekt wohl Jahresende anfangen zu realisieren. Die Basis wird ein Gestell aus Alu-Profilen sein, 3D Druckteile in orange für die Ecken und diverser anderer Dinge, 2 Antriebe (Skater-Rad, 5Nm Getriebemotor) und ein 3. Rad (Rolle), ein PBAkku (12V/12Ah, 3800g) wird der Energiespeicher, als Gehirn wird Jetson Nano oder Raspberry Pi 4/4GByte mit diversen µController verwendet, Software wird wohl Ubuntu/Debian mit ROS/Python, Sensoren werden Intel RealSense Depth Camera D435, IMU und diverse Nahfeldsensoren.




03/2019 - ich habe ein NVIDIA Jetson Nano Developer Kit bestellt und werde es hier verwenden.
08/2012 - es werden zwei Raspberry Pi als sekundärer Kreis/MMI Interface verwendet. Dieser werde ich mit einem Netzwerkabel direkt verbinden. Der primäre Kreis wird über eine serielle Schnittstelle an beide Systeme angeschlosssen.
05/2012 - es geht weiter. Ich habe mir nun mal wieder Gedanken gemacht, wie ich das reglungstechnisch hin bekomme. Meine Idee 2 Kreise, primärer Kreis Controller mit Sensoren und Aktoren, sekundärer Kreis PC mit Sensoren und Aktoren. Der primäre Kreis wird wohl ein PicAXE 40X2, der sekundäre Kreis ein Intel Atom Board oder was ähnliches.
An der mechanischen Seite hat sich wenig geändert, 3 (2 Motoren, 1 Rolle) oder 4 (4 Motoren) Rad Gestell.
Beschreibung (Entwurf 07/2005)
Der Roboter soll mal das ganz normal sich in einem Haushalt bewegen können und gewisse Aufgaben übernehmen können.
Im wesentlichen besteht der Roboter aus dem Fahrwerk, dem Mensch Maschine Interface (MMI) und Manipulator.
Fahrwerk
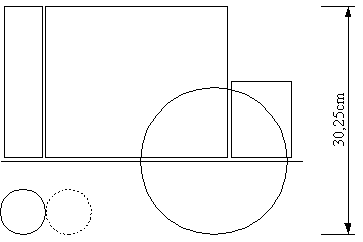
Ich denke bei dem Fahrwerk an eine Konstruktion mit drei Rädern, zwei Räder (Luftbereifung) werden angetrieben, ein Rad (Labor- oder Möbelrolle) läuft mit. Das grundlegende Material wird 6/9mm Sperrholz sein, stark beanspruchte Stellen werden mit GFK oder Metall hinterlegt.
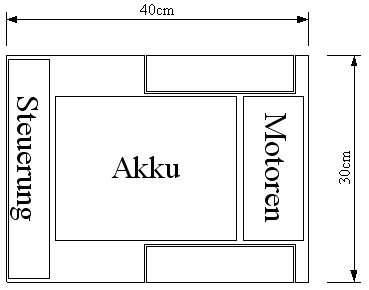
Das Fahrwerk wird von einem oder mehreren Mikrocontroller gesteuert, welche die Informationen an das MMI weitergeben. Es ist zu überlegen ob diese Steuerung nicht mehrfach ausgelegt werden sollte, weil die Gefahr bei einem Gewicht von 20 bis 25 kg nicht zu verachten ist. Als Sensoren kommen vor allen Abstandssensoren zum Einsatz, welche Art verwendet werden soll, kann man immer noch entscheiden. Diese Mikrocontroller müssen auch ohne dem MMI funktionieren und dürfen sich nur wenn ein gefahrloser Aktionsraum besteht vom MMI ansteuern lassen.
Als Energieversorgung verwende ich Blei Akkus (12V, ca. 50Ah), weil diese einige Vorteile gegenüber anderen Varianten haben. Es muß ein Modi gefunden werden wie dieser Roboter sich wieder selbstständig bei Bedarf seine Energiequelle wieder auf lädt. Zentraler Punkt mit Karte und Nahfeld Bake ist da wohl optimal.
Bei dem Motor dachte ich an einen Gleichstrommotor mit entsprechender Stärke, wobei man hier erst eigentlich das Gewicht so genau wie möglich bestimmen muß, um nicht zu viel Leistung und damit Geld in den Antrieb steckt. Die Räder und das Getriebe müssen aufeinander abgestimmt sein.
Das Problem mit den Motoren scheint sich zu einem echten Problem zu werden. Ich gehe davon aus das der ganze Roboter so 45 bis 60 kg wiegen wird. Ich habe mir mal ein paar Motordaten ausrechnen lassen. Der Durchmesser (150 .. 200 mm) der Räder und die Drehzahl (5600 .. 6000) ist da wohl das wichtigste, da komm ich auf 6 bis 12 Ncm am Motor, bei einem Getriebe von ca. 1:300 je Rad. Das Getriebe wird 4 .. 6 Stufen haben, das macht die Sache etwas einfacher und kompakter. Ich tendiere zu einem speed 900 von Graupner, Bühler Getriebemotor 300mNm oder Torpedo 800 aus dem Conrad Katalog, preislich liegen Motoren von Graupner und Conrad ziemlich nah bei einander, der Bühler kostest allerdings nur die Hälfte. Ich werde die nächsten Tage mir mal die Datenblätter genauer anschauen.
Mensch Maschine Interface (MMI)
Das MMI besteht im wesentlichen aus zwei PC mit je einer Kamera. Die PC werden mit 12V betrieben. Als Betriebssystem ist LINUX, QNX oder MS Windows angedacht.
Als Software müssen folgende Fragen geklärt werden:
Manipulator
Das ist das komplizierteste mechanische Teil, weil man hier eine Menge mehr Dinge beachten muß.
Wieviele Freiheitsgrade braucht der Manipulator?
Welche Last muß der Manipulator bewältigen?
| Gesamt | 160,00€ | |
| Mechanik | 40,00€ | |
| Räder | 0,00€ | |
| Elektronik | 50,00€ | |
| Raspberry Pi (2x) | 70,00€ | |
Stephan Günther, 1997-2024, letzte Änderung 26.12.2021, Datenschutzerklärung, Disclaimer, Powered by GetSimple