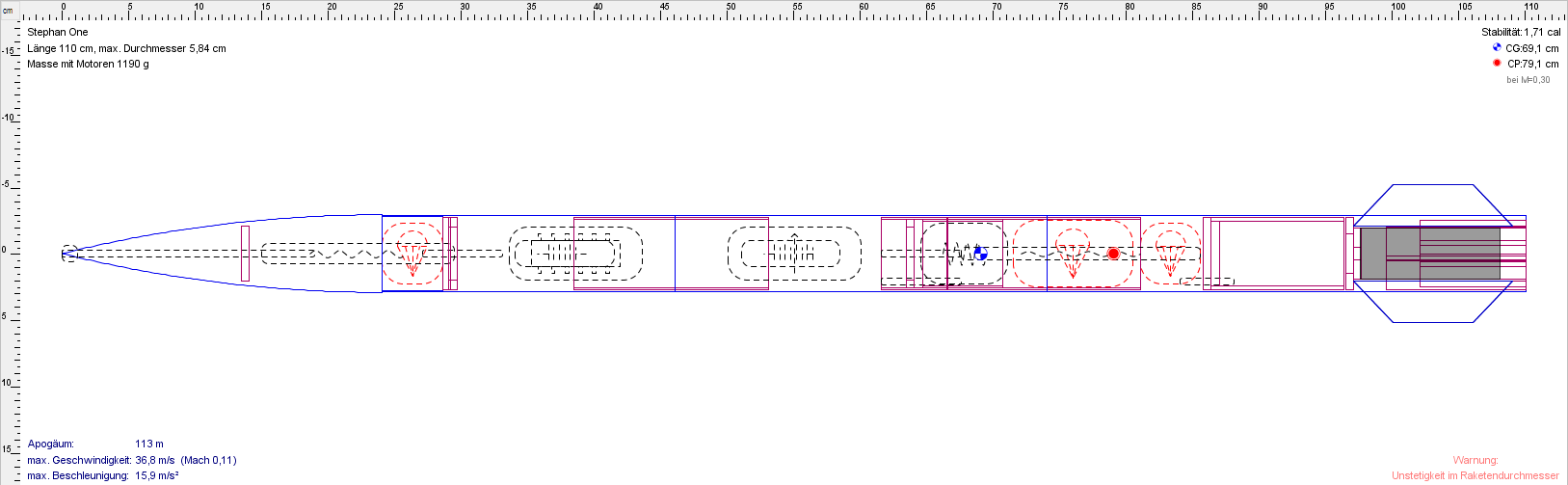
Stephan One
Hauptseite, Startseite
Beschreibung
Basis
- 57/54mm Körperrohr, Länge 860mm (LOC)
- Spitze 240mm (LOC)
- Gesamtmasse 850..1200g (incl. Motoren)
- Gesamtlänge 1100mm
- 2/4 zusätzliche Booster (Planung)
- 41,5/38mm Körperrohr Länge 300mm (LOC)
- Spitze 200mm (LOC)
- Abwurf geplant
Antrieb
- Hauptantrieb
- BC125 (Maurer)
- BC80 (Maurer)
- 5x18mm (Klima)
- Booster
- BC125 (Maurer)
- BC80 (Maurer)
- 3x18mm (Klima)
Bergungssystem
- Notfallschirm
- Strömer
- Fallschirm mit Mittelöffnung
- Vorfallschirm (Klima)
- Hauptfallschirm (Klima)
- Rotor (geplante Entwicklung, zum gezielten Landepunkt)
Elektronik
- primäres System
- eigene Entwicklung
- Arduino/ Raspberry Zero
- Drucksensor (I2C(4))
- Lagesensor (I2C,(4))
- Schaltstufe (IO(3), GND) -> ULN2803
- Kontakte (IO(3), GND)
- Kommunikation zum Slave (IO(2), GND)
- Datenspeicher (EEPROM,I2C(4))
- AltiMax G3 2016
- sekundäres System
- eigene Entwicklung
- Arduino
- Schaltstufe (IO(3), GND) -> ULN2803
- Kontakte (IO(4), GND)
- Kommunikation zum Master (IO(2), GND)
- AltiMax Simple 2016
- Video/Daten Plattform/primäres System
Nutzlast
Bilder



Stephan Günther, 1997-2026, letzte Änderung 22.03.2021, Datenschutzerklärung, Disclaimer, Powered by GetSimple CE
