
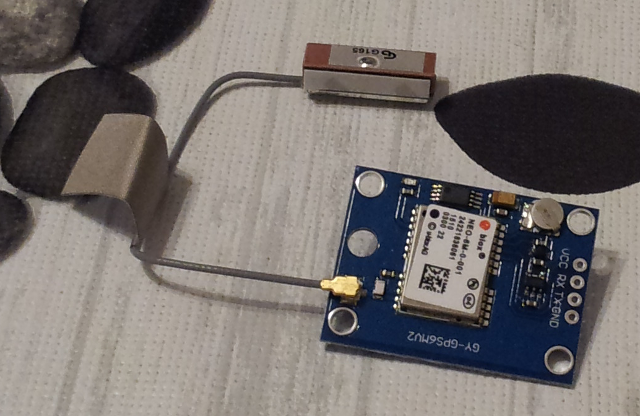
RaspberryPi Zero W GPS Modul
Hier geht es um ein Bergungssystem basierent auf dem Raspberry Pi Zero einer Modellrakete mit einem Kaliber von mindestens 54mm. Ich teste aber auch noch ein Kaliber von 40mm.
Teileliste
Software
Das Betriebesystem ist Raspbian oder ein minimales System (buildroot).
Die Programmierung der Anwendung erfolgt zur Zeit in Python.
Der Zugriff auf die GPIO's erfolgt mit der Bibliothek pigpio.
Die laufenden Daten kommen auf eine RamDisk, das System wird ReadOnly gesetzt, die gespeicherten Daten kommen auf eine dritte Partition, um die SDCard zu schützen, das Backup kommt natürlich auf die SDCard.
Python
tracker.py - GPS Auswertung über serielle Schnittstelle (softserial),
sms.py - GSM/GRPS Kommunikation,
ablauf.py - die primäre Steuerungssoftware
Hardware
Allgemein
Der RPi Zero W hat nur eine serielle Schnittstelle, diese werde ich für das GSM/GPRS Modul nutzen. Eine zweite serielle Schnittstelle werde ich per Software realisieren für das GPS Modul. Dieses Modul benötigt nur eine Geschwindigkeit von 9600.
Sensoren
Der Drucksensor benötigt genug Raum um richtig zu messen, sonst kann es zu Fehlinterpretation kommen. Diese kann dann das auslösen des Backupsystem hervorrufen.
Aktoren
technischer Ablauf
Der Ablauf teilt sich in Systemstart und Anwendung auf, es müssen Abläufe eingehalten werden bzw. zugesichert sein, sonst kann auf der Startrampe das Bergungssystem ausgelösst werden.
Die Abläufe in der Anwendung sind wie folgt
Bilder
RaspberryPi Zero W GPS Modul
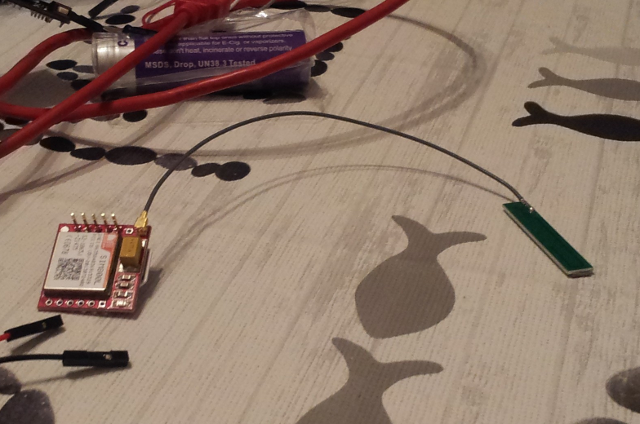

GSM/GPRS Modul Testaufbau mit einem Raspberry Pi B+
Stephan Günther, 1997-2026, letzte Änderung 05.05.2026, Datenschutzerklärung, Disclaimer, Powered by GetSimple CE