
2006 2007 2008 2009 2010 2011 2012 2013 2014 2018 2019 2020 2021
Ich baue an einer größeren Modellrakete, Magnum von LOC. Ich habe die Modellrakete im Jahr 2006 bei Raketenmodellbau Klima GmbH gekauft, grins, wer mich kennt bei mir dauern manche Sachen immer länger. Die Modellrakete hat einen Durchmesser von 140mm und eine Länge von ca. 2000mm.
Aufgabeliste
History
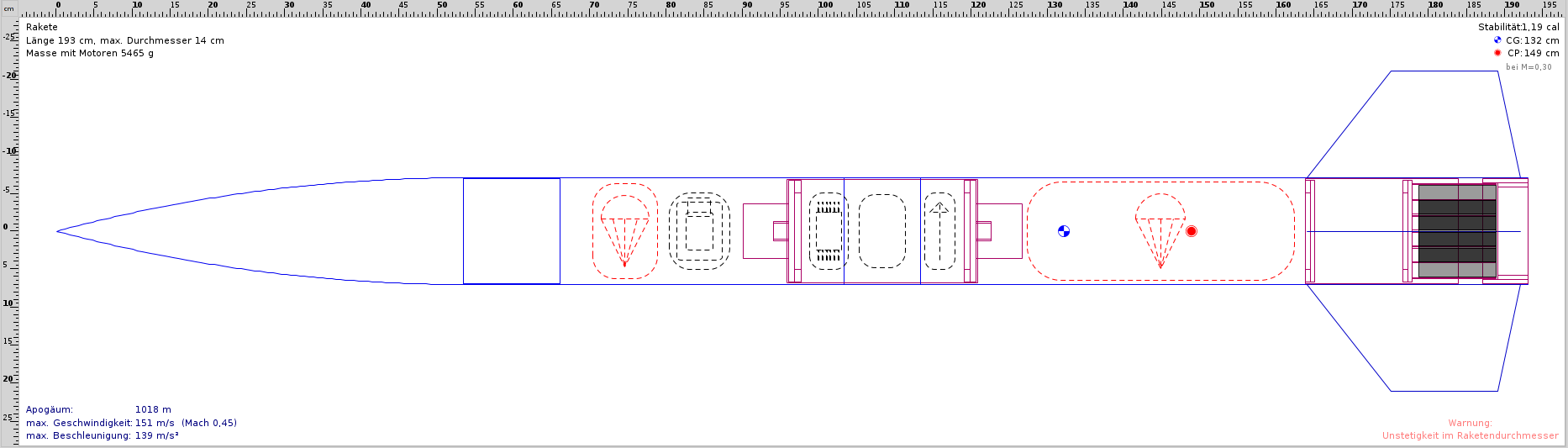
Dezember 2019 - neue Konzeption der Modellrakete, 2 Stufenbergung, duales Bergungssystem (Raspberry Pi, Altimeter G3 2016)
Die Flossenbefestigung wird aus dem 3D Drucker kommen.
April 2018 - Entwicklung einer neuen Bergungselektronik als Alternative zu Altimeter G 2016. Die Basis kann ein Arduino oder ein Raspberry Pi (Zero) sein.
Oktober 2014 - Sie ist mal wieder gestartet, aber leider nicht ohne Zwischenfall.
Ich hatte die Modellrakete fertig gebaut, neues Heck, neue Spitze, neue Elektronik.



Die Elektronik ist ein Arduino UNO gewesen. Sensor war für den Luftdruck ein BMP085, Aktor war ein ULN2803 für den Zünder der Ausstossladung. Die Software ist von mir in C/C++ auf der Arduino IDE geschrieben.
Der Start war top, der Flug war auch gut, aber irgendwie ist die Ausstossladung nicht raus gekommen. Ich werde wohl in Zukunft ein duales System verwenden, unabhängig von einander.



August/September 2013 - das neue Heck wird langsam, ich habe es vollkommen neu gebaut. Die Basis ist ein Rohrverbinder, ich habe noch entsprechende Adapterringe und Adapterscheiben. Das untere Ende hat die Adapter für 4xBC125 (38mm) und das obere die Halterung für den Fallschirm.



Januar 2013 - Die Reperatur wird so langsam, erstmal den Schaden durch die Feuchtigkeit beseitig. Das Leitwerk muß neu gestaltet werden. Die obere Hälfte wird jetzt doch benötigt, siehe Projekt Experimental Rakete "raspberry pi".
Oktober 2012 - Das Wetter war nicht so gut. Am Samstag war an starten nicht zu denken, Sonntag war das Wetter dann besser. Die kurze Magnum ist am Sonntag geflogen. Als Antrieb habe ich zwei Stirnbrenner mit Peak verwendet. Sie flog gut, tat sich beim Start aber etwas schwer. Stirnröhrenbrenner wären besser gewesen, aber sie kam auf 120m. Der Auswurf des Bergungssystemn erfolgte etwas zu früh, aber es ging noch. Die Landung erfolgte leider auf der Start/Landebahn (Beton), durch den Wind nahm die Modellrakete eine Schräglage eine und schlug mit einer Flosse auf. Dieses beschädigte die Hecksektion und der Wind zog die Rakete noch 1km weiter bis ich ran war. Da wissen wir mal wieder warum es Sport genannt wird. Ich muß die Hecksektion komplett neu machen, sie wurde zu stark beschädigt. Bericht
April 2012 (Ostern) - Die erste kurze Variante wurde in einer Nacht zusammen gebaut. Ich hatte alles dabei, aber auf Grund einer Lieferschwierigkeit, hatte ich nicht das gesamte Bergungssystem dabei. Ich habe mir dann eine Variante ausgedacht, die mit einem Fallschirm und einem Kolben funktioniert. Die Motorhalterung ist jetzt eine symetrische Anordnung (2x2), insgesamt 4xBC125. Die BC125 können mit unterschiedlichen Reloads versehen werden.
Ich muss einigen Menschen danken. Wolfgang und Frank haben die Magnum, nach meinen Ideen, zusammen gebaut. Dirk hat mir die ersten zwei Motoren zusammen geschraubt. Die Elektronik habe ich dann modifiziert, auf eine einfache Zeitsteuerung mit Abreisskontakt an der Startrampe.
Die Magnum ist am Ostersonntag zweimal gestartet. Beide Starts, 2xBC125, verliefen erfolgreich, die erreichte Höhe war ca. 200m. Die Magnum war ca. 3kg schwer. Der Fallschirm hatte einen Durchmesser von 150cm.



Der Erststart erfolgte am 08.04.2012 in einer modifizierten Variante.
Mai 2011 - Die Motoren sind bestellt, 4xBC125 von Maurer. Der erste Start wird 3xBC80 und 1xBC125 sein, der nächste Start wird dann mit 4xBC125 erfolgen. Die endgültige Konfiguartion wird dann 1x54mm und 3x38mm sein.
Die Software ist fast fertig und nun auf Terminal umgestellt. Der Controller wird wohl nun ein PicAXE28x2 sein, ein GPS Empfänger kommt auch noch dazu. Die Druckmessung erfolgt über ein Modul von Bosch. Der aktuelle Stand der Software ist hier einsehbar.
März 2011 - die Software ist nochmal geändert worden. Ziel ist es mit einem Terminal Programm den Controller programmieren zu können. Als Controller wird ein PicAXE28X1 oder 40X1 verwendet, zu programmieren sind beide Controller gleich.
Die Motorkonfiguration wird zum Testen 2x29mm und 1x38mm sein, so kann ich erstmal die orginale Motorhalterung verwenden. Der erste Testflug wird wohl ein Mitteltrenner sein und dann die Klappenvariante.
Juli 2010 - die Software für den Controller ist fast fertig. Das Steuerprogramm auf dem PC soll eigentlich in Java geschrieben werden. Diese Programm wäre damit auf jeden Betriebssystem ausführbar, ich habe aber noch Probleme mit der seriellen Schnittstelle unter Java. Ich habe noch ein zweites Kontrollprogramm unter Windows, VB/Net, geschrieben.
Juni 2010 - die ersten Bilder von den benötigten Teilen. Der Druckkolben mal von oben und unten. Eine Motorhalterung habe ich auch mal angefangen. Diese Motorhalterung ist für einen 38mm und 2x29mm Motor vorgesehen. Die obere orginale Motorhalterung ist für einen 54mm Motor vorgesehen. Die orginale untere Motorhalterung is für 1x54mm und 2x29mm Motor vorgesehen. Die Motorhalterung wird nun doch 1x54 und 3x29, dann bekomme ich die Flossen noch ohne Probleme unter. Die Platten werde ich die nächsten Tage bestellen.
Die orginalen Flossen von PML werde ich wahrscheinlich ändern, weil wie unten schon geschrieben passt mir die Hecksektion nicht. Die Flossen werden im Orginal durch das Körperrohr an die Motorhalterung befestigt. Ich überlege die Flossen auszufräsen und dann dünn zu bekleben.
Die Spitze werde ich auch bearbeiten. Den Boden aussägen und die Spitze mit dem oberen Körperrohr verbinden.
Mai 2010 - mal ein Bild von der Rakete neben mir damit man mal einen Eindruck bekommt. Ich werde wohl die gesamte Hecksektion mit den Flossen neu überdenken, da gefällt mir was nicht.
Februar 2010 - die Teile sind da, es war nicht Schuld der Firma, sondern ich hatte das Geld erst spät überwiesen und das Material braucht seine Zeit. Die Teile sind sehr gut geworden.
Weinachten 2009 - ich bestellte noch zusätzliche Teile aus Speerholz, bei Frässdienst Schulze, um die Modellrakete flexibler gestalten zu können
September 2008 - erste Entwürfe der Software in BASIC erfolgt, wobei die Grundlage der Entwurf in C gilt, welchen ich schon 2007 gemacht hatte.
April 2008 - die Elektronik wird ein PicAXE sein, ein PIC von MicroChip mit einem BASIC Runtime System. Diese Bausteine gibt es in unterschiedlichen Ausführungen. Meine Controller beziehe ich von roboter-teile.de, diese Firma ist mir von meinem zweiten Hobby, Roboter bauen, bekannt. Die Grundsoftware ist hier einsehbar
2007 - der Softwareentwurf für den Controller in C wird gemacht.
Weinachten 2006 - ich wollte mal was grosses bauen und fliegen. Ich kaufte mir bei Klima Modellrakten eine Magnum3 von LOC. Sie sollte das Hybrid Zeitalter bei mir einläutern :-)
Stephan Günther, 1997-2026, letzte Änderung 19.02.2021, Datenschutzerklärung, Disclaimer, Powered by GetSimple CE