Ich verwende gerne µController für den LowLevel-Bereich.
Die Verwendung fällt meist auf Microchip und dort besonders auf PicAXE.
Es werden natürlich auch andere Contoller verwendet wie Arduino, ... Für die leistungsstärkeren Anwendungen wäre da auch noch ChipKIT oder TI.
Eine weiter Gruppe der µController basieren auf dem ESP8266, ich habe Wemos D1 mini, ESP201 und IoT WIFI Board im Einsatz. Diverse ESP32 sind vorhanden.
Teensy 3.5, Teensy 4.0 und Teensy 4.1 gehören dazu.
Raspberry Pi Pico und Raspberry Pi Pico W sind auch ein µController.
Es gibt noch zusätzliche Dinge wie Sensoren, Aktoren und Kommunikationseinheiten, aber nicht nur für die µController, sondern auch für den Raspberry Pi.
Ich zeige hier verschiedene Anwendungsfälle.
PicAXE
PicAXE sind Controller, welche einen Bootloader und einen BasicCompreter on Chip haben. Der Hersteller ist Revolution Education Ltd aus Großbritannien.
Die Hardware ist einfach gehalten und es gibt die unterschiedlichsten Typen je nach Anwendungsfall. Es sind 8bit Controller, was für meine Anwendungsfälle meist ausreicht. Die Größe geht von 8 bis 40 Pin im DIL Format, was das Arbeiten mit diesen Controller einfacher macht. Die Versorgungsspannung kann von 1,8V bis 5V gehen je nach verwendeten Chip.
Die Software gibt es beim Hersteller kostenlos zum runterladen. Diese Software "AXEpad" läuft unter MS Windows, MacOS und Linux. Die Handbücher und die technischen Beschreibungen gibt es hier.
Arduino startet mit einer Entwicklung aus Italien auf der Basis eines AVR (8bit). Es gibt verschiedene Boards und Shields, welche alle ein Problem haben. Das Problem ist das die Buchseleiste an einer Stelle nicht dem Standardweite von 2,54mm entspricht, sondern nur 1,27mm.
Die Entwicklung in Richtung Steckboard taugliche Boards begrüße ich sehr.
Die Boards sind universell zugeschnitten, die Shields sind auf die Aufgabengebiete zugeschnitten. Die Software, für Windows, Linux und MacOS, gibt es kostenlos auf der Web Seite.
Eine gute Quelle ist die Web Seite von Arduino.
Im Einsatz sind Uno, Micro, Mega2560 und Nano 33 BLE Sense Rev2.
Diverse Clone auf Basis des Nano's und Sparkfun Fio V3.
Die Firma Watterott hat ein interessantes Stück Hardware entwickelt, RPi-Shield-Bridge, Anleitung.
Diese Boards der Firma Digilent sind eine gute Alternative zum Raspberry Pi für einfache Steuerungsaufgaben. Als Hardware werden Pic32 von MicroChip verwendet. Das Hardwareformat ist wie ein Arduino. Die technischen Daten sind aber wesentlich besser 32 bit, 80MHz, 128KB Programmspeicher und 16KB Arbeitsspeicher. Die Stromversorgung läuft allerdings nur auf 3,3V und nicht auf 5V wie bei Arduino.
Die Software ist inzwischen in der Arduino Software eingebaut.
chipKIT™ Pi ist eine Erweiterung für den Raspberry Pi, es ist ein Ardunio Clone.
Stellaris LaunchPad verwende ich. Ich habe zwei davon günstig in der Testphase bei TI bekommen, auch wenn wir, TI und ich, erst es nach einem Jahr geschafft haben, die Teile zu bezahlen.
Zur Programmierung verwende ich nicht die orginale Software sondern energia. Eine Arduino ähnliche Software. Einige Sachen muß man beachten, aber dazu später.
Druck
Der BMP085 wird von mir verwendet. BMP180 und BMP280 gibt es auch.
Beschleunigung
BMA180 tut bei mir gute Dienste, obwohl er etwas störig ist.
Kompass
HMC5883L verwende ich, einen 3 Achsen Kompass. Das Problem ist nicht das eigentlich messen, sondern die Kalibrierung des Kompasses auf die Situation. Es gibt ein gutes Windows Programm, bloß was macht man wenn man kein Windows mehr hat. Ich probiere das Programm zur Zeit unter Wine bzw. Mono zum laufen zu bekommen, mal schauen was das wird.
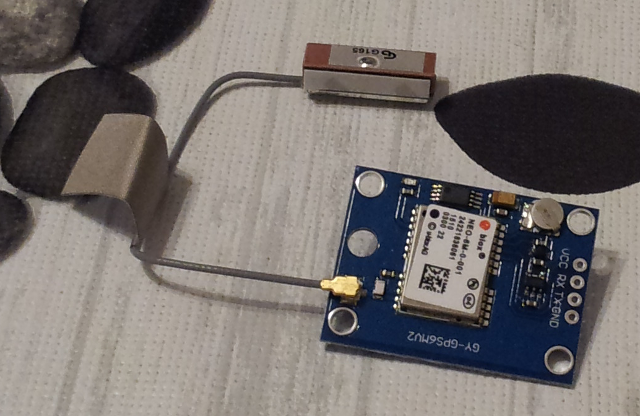
GPS
EM406a ist bei mir das Schmuckstück.
Ein neues GPS Modul ist im Bestand, GY-NEO6MV2.
Entfernungen/Abstand
Ultraschallsensoren, langsame Messung bei größeren Entfernungen
Lidar Sensoren, optische Weitenmessung per Laser
Infrarot Messung, optische Weitenmessung im mittleren Bereich
Schaltstufe
ULN2803, NPN Darlington-Array
Servo
Ein Servo kann von fast allen µController direkt angesteuert werden.
Gleichstrommotor
Fahrtregler (ESC, electronic speed control engl.), bekannt aus der Modellbaubranche, Vorteil ist das dieser nur ein Servosignal zum steuern. Bei "Butler Hund" wird ein ESC von Conrad verwendet.
DC-Motorregler, gibt es in allen Varianten und Größen, der Nachteil ist das man in der Regel 3 Signale (2xRichtung, 1x PWM) pro Motor benötigt. Bei diversen Robotern, Raupe und Mini, verwende ich Motorregler (L293D, L295D).
RN-VX
Eine Kommunikationseinheit die einem µController eine Netzwerkschnittstelle (WLAN) zur Verfügung stellen. Ich verwende ein RN-171 im XBee Format.
Bluetooth
Eine Bluetooth Schnittstelle ist für die Kommunikation zwischen einem eingebauten Controller und einem externen Endgerät gut zu verwenden, vor allem wenn man auch noch den Controller über die Schnittstelle programmieren kann. Ich verwende das XBee Format "BTBee - Bluetooth SPP Module" für den Arduino.
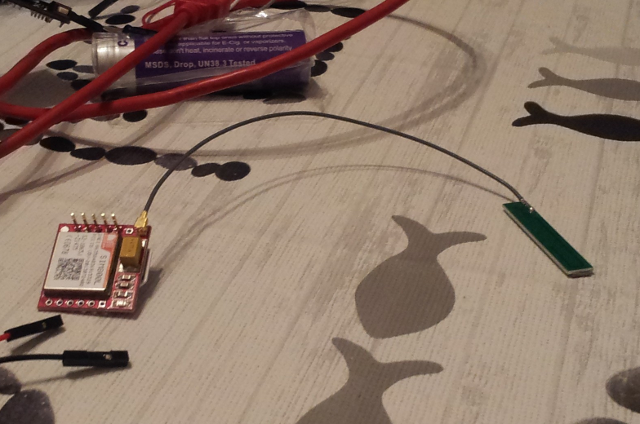
GSM/GPRS
Ich habe mir ein SIM800L besorgt, wird über die serielle Schnittstelle angesprochen. Die Stromversorgung (3,4V bis 4V) ist etwas speziell, ich habe das Problem mit eine LiPo (3,7V, 2250mAh) gelöst. Das Modul werde ich im Bergungssystem verwenden.
Stephan Günther, 1997-2026, letzte Änderung 06.02.2026, Datenschutzerklärung, Disclaimer, Powered by GetSimple CE
{kind=link}
{kind=link}