Das wird ein "kleiner" Roboter als einfaches Projekt.
Als mechanische Basis dient ein Crawler, Ansmann RockRuler. Die Maße sind Länge 430mm und Breite 250mm. Die Bodenfreiheit ist 85mm.
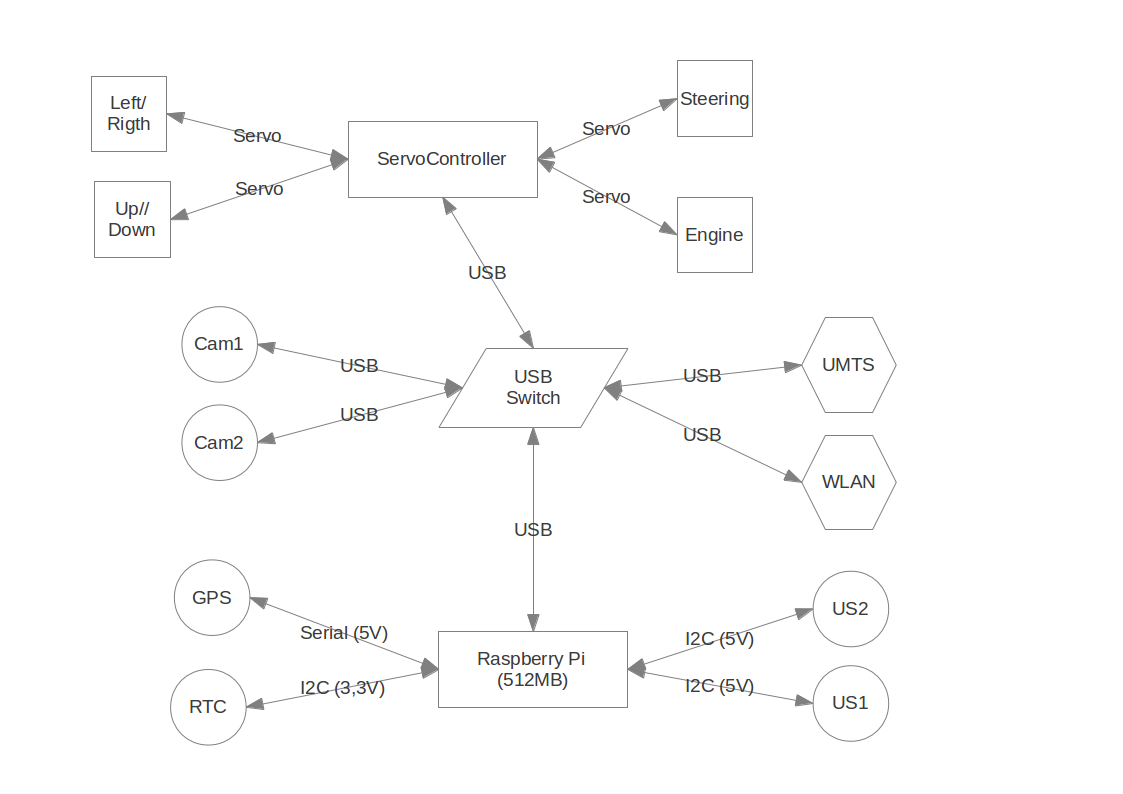
Der primäre Steuerkreis (LowLevelSystem) wird ein PIC32, PIC18 oder ein AVR, der sekundäre Steuerkreis (HighLevelSystem) wird ein Cluster von Raspberry Pi :-).
Die Sensoren werden US-Entfernungsmesser, GPS und zwei Kameras (USB) sein. Die Aktoren werden elektronischen Fahrtregler, Servos (Lenkung [vorne hinten], Kamera [Hoch/Runter, Links/Rechts]) und Schaltstufen sein. Die Kommunikation wird über WLAN, GSM oder GRPS laufen.
09/2013 - der primäre Steuerkreis muß noch mal neu entwickelt werden, da die Software und Hardware nicht so will wie ich. Die Basis ist jetzt ein UNO32 (Microchip, PIC32MX) von ChipKit.
Ich hoffe das es dann so wird wie ich will. Das Problem ist, das das Einlesen der Fernsteuerungsdaten, das Einlesen der GPS Daten und die Bereitstellung der Servoimpulse für Antrieb und Lenkung den Ardunio etwas überlastet haben. Die Servos hatten die Eigenart zwischendurch sich zu verstellen, sprich es gingen Impulse verloren oder es kamen falsche Impulse. Die Kameras werden zwei RPi Cams.
06/2013 - Ein neues System (HighLevel) wird neu entwickelt ohne LowLevel System. Das Problem ist das es keine direkte Eingriffsmöglichkeit (Fernsteuerung) gibt. Dieses System darf dann nur auf privaten und gesichertem Gelände getestet werden, es muß auch ein Not-Aus Button vorhanden sein.
05/2013 - der primäre Steuerkreis ist fertig, ein kleines Problem am Crawler muß noch gelöst werden. Die Vorderachse steht 15 Grad nach vorne geneigt. Das Problem hat sich erledigt.
01/2013 - die Entwicklung des primären Steuerkreis hat begonnen, PIC18 (PicAXE28X2), RX (2,4GHz), GPS und 3 US Sensoren.
12/2012 - der Zusammenbau ist beendet :-)
09/2012 - Zusammenbau des RockRuler, wird noch ein Weile dauern.
08/2012 - Projektbeginn, RockRuler ist bestellt und geliefert worden. Die Elektronik für den primären Steuerkreis ist bestellt. Die Raspberry Pi (2) habe ich schon da.
Begriffe
primärer Steuerkreis - LowLevel System
sekundärer Steuerkreis - HighLevel System
Bilder


Stephan Günther, 1997-2026, letzte Änderung 30.03.2019, Datenschutzerklärung, Disclaimer, Powered by GetSimple CE